-
Tweets39
-
Followers27
-
Following804
-
Likes134
The TurboQuant paper (ICLR 2026) contains serious issues in how it describes RaBitQ, including incorrect technical claims and misleading theory/experiment comparisons. We flagged these issues to the authors before submission. They acknowledged them, but chose not to fix them. The paper was later accepted and widely promoted by Google, reaching tens of millions of views. We’re speaking up now because once a misleading narrative spreads, it becomes much harder to correct. We’ve written a public comment on openreview (openreview.net/forum?id=tO3AS…). We would greatly appreciate your attention and help in sharing it.
Introducing TurboQuant: Our new compression algorithm that reduces LLM key-value cache memory by at least 6x and delivers up to 8x speedup, all with zero accuracy loss, redefining AI efficiency. Read the blog to learn how it achieves these results: goo.gle/4bsq2qI

on a side note, the founders of inception labs have designed a comprehensive course on deep generative models with a curated combination of videos + notes/slides + related papers + projects. def worth to checkout.


Mercury 2 is live. The world's first reasoning diffusion LLM – 5x faster than leading speed-optimized autoregressive models. Built for production: multi-step agents without delays, voice AI with tight latency budgets, instant coding feedback. Diffusion-based generation enables


You either die a state of the art or live long enough to see yourself become the baseline
@hallerite ludic looks clean. excited for the rlm part
@zhaisf love this duality: treating low-rank gradients as feature (LoRA) vs bug (Muon) perfectly captures the trade-off in modern training

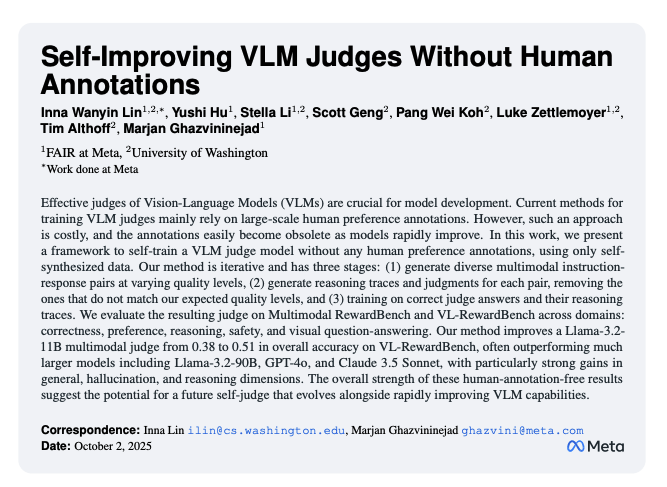
Self-Improving VLM Judges Without Human Annotations
@yuviecodes @elonmusk @xai @krishgarg @lohanipravin nah bro keep your evil ad-injecting ai shit away from my shows, we never asked for this dystopian garbage 💀
@willccbb yeah this hits hard, basically hedge on steroids. still wondering if any of the new process-rl stuff actually escapes the base support or just finds fancier ways to collapse it 😂
Both Perceptual Control Theory (PCT) and the Bayesian/Predictive Processing (PP) framework aim to explain how organisms achieve adaptive behavior in uncertain environments. Although they appear opposed, they actually capture different levels of description. Understanding their relationship requires separating mechanistic implementations, functional descriptions, and computational metaphors. 1. What PCT gets right. PCT highlights a core fact about control systems, biological or engineered, organisms act to control their sensory input, not their motor output. This reframes behavior as the ongoing reduction of deviation from an internally maintained “reference value.” PCT’s successes include catch a flyball, constant optical velocity is easier and more robust than trajectory prediction. Cursor disturbance experiment, people compensate for structured forces without consciously modeling them. Robotics parallels, balance and locomotion often work best with simple reactive controllers, not predictive models. Strength: PCT captures real-world robustness by emphasizing closed-loop control and error correction happening moment-to-moment. 2. What predictive processing gets right. Predictive Processing argues that the nervous system is constantly generating top-down priors about expected sensory states. This isn’t necessarily “future forecasting” in the lay sense. It’s a statistical description of how neural systems reduce surprise and maintain stability. Predictive models are supported by cortical laminar structure (feedback-dominated loops), mismatch negativity electrophysiology, sensorimotor control in fast movements (e.g., saccades), motor planning and anticipatory postural adjustments, cerebellar timing and internal forward models Strength? PP captures how neural systems exploit statistical regularities across time, not just reaction, to stabilize perception and coordination. 3. Why they Ssem to conflict (but don’t)? The conflict arises from conflating two questions, a) Does the organism need an explicit internal model? PCT says no. Behavior can be generated through immediate error correction. PP says yes. Hierarchical priors implicitly encode expectations. b) At what level is “prediction” occurring? PCT focuses on active control loops at the phenomenological and behavioral engineering levels. PP focuses on neural coding strategies, cortical dynamics, and probabilistic inference. Key point. Reactive control and predictive coding can coexist as different layers of the same system. Spinal reflex arcs. PCT-style fast reactive loops. Cerebellar-cortical interactions. PP-style forward models and error minimization. No organism is purely predictive or purely reactive. 4. What the “Hello” experiment actually shows. The experiment demonstrates people can compensate for structured forces without conscious awareness of the structure. Control can succeed without forming an explicit internal model of the disturbance. This supports PCT, but does not refute PP because, sensory prediction errors are still required for control. The controllers could still operate on internal priors about cursor motion or proprioceptive state. The absence of conscious modeling does not imply the absence of implicit modeling in the nervous system. The experiment refutes overly intellectualized, symbolic predictive models, not predictive processing itself. 5. A more integrated scientific view? PCT explains the real-time control architecture. Fast, low-level, negative feedback loops maintaining stability under perturbations, automatically correcting errors without explicit modeling. PP explains the representational and statistical architecture., how the system organizes sensory information, how expectations modulate perception, how the brain compresses and generalizes from past experience, how control targets themselves are selected or updated. An integration hypothesis? The brain uses predictive coding to set reference signals and expected sensory states. PCT-like reactive loops then implement these states in real time. This hybrid model solves robustness (from PCT), generalization and learning (from PP), multiscale control (from integrating both). 6. Why this matters for neuroscience? The controversy dissolves if we recognize that prediction and control are not mutually exclusive. Prediction shapes desired perception. Control maintains that perception against disturbances. For robotics? Robust agents will require both predictive layers for planning, anticipation, and environmental modeling. Reactive control loops for stability and disturbance rejection. For theories of agency? Agency emerges not from prediction or reaction alone, but from maintaining internally specified reference values, updating those values through experience, and stabilizing perception through continuous closed-loop action This aligns beautifully with both the PCT perspective and the deeper generative principles you’re developing.🤔

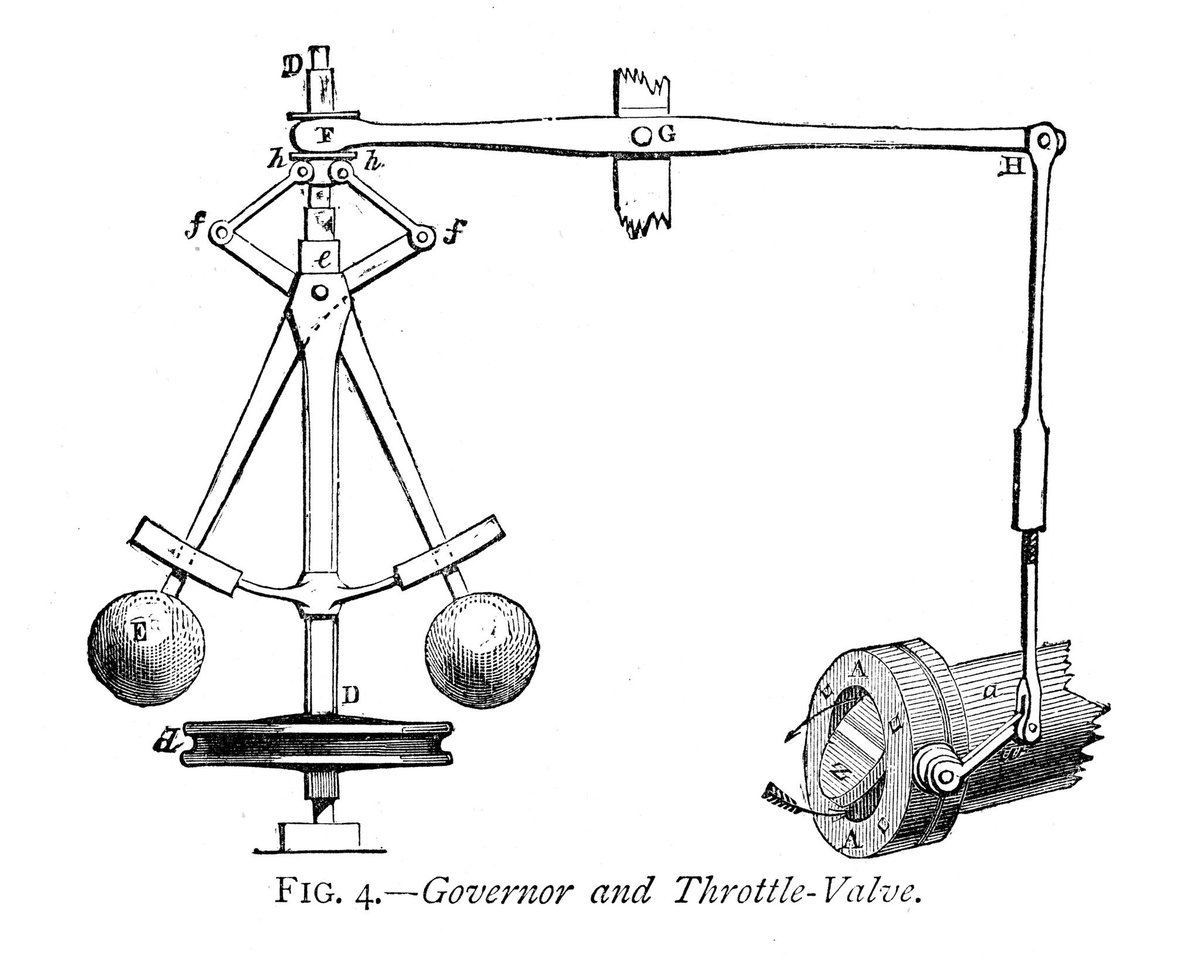
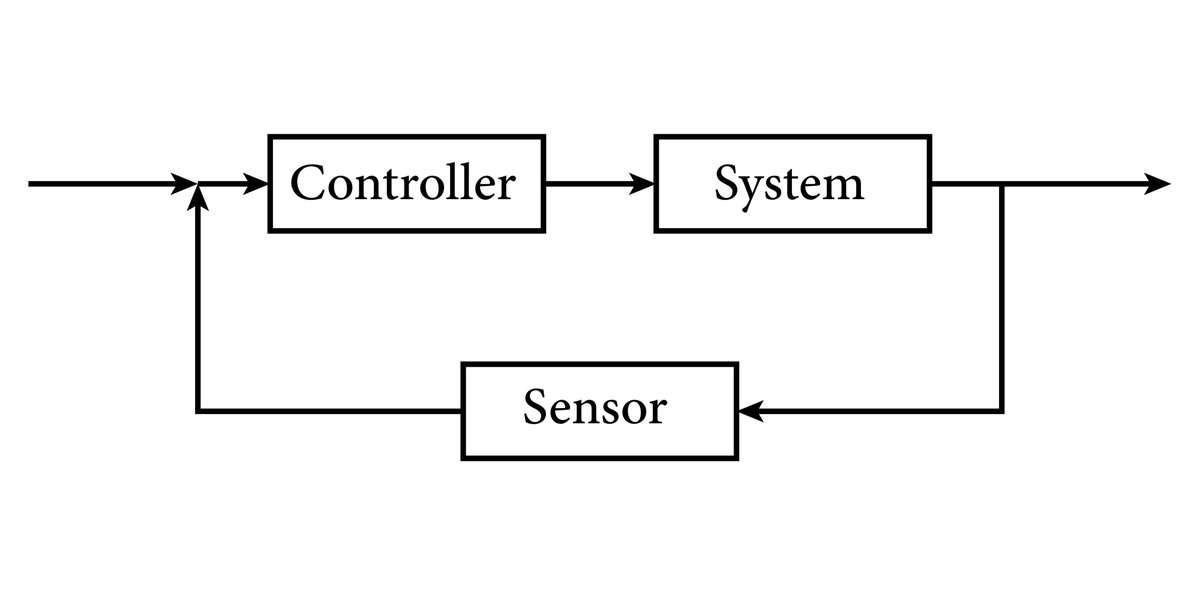
We've become obsessed with the idea that the brain is a "Prediction Machine." The dominant theory in neuroscience says we're constantly simulating the future, calculating probabilities to guess what happens next. A new paper argues this is a complete illusion. The reality is simpler, and strangely, much more powerful. Here is the argument for Perceptual Control: The "Prediction Illusion" starts with a mistake in observation. When we see someone successfully handle a chaotic environment (like catching a flyball), it *looks* like they predicted the future trajectory of the ball. But observing prediction isn't the same as implementing it. The authors use the perfect analogy: The Watt’s Steam Governor. In the 19th century, this device kept steam engines running at a constant speed. If pressure surged, it slowed the engine. If load increased, it sped up. To an observer, it looked like the machine was "predicting" pressure surges and pre-empting them. But the Governor has no brain. It has no model of the future. It’s a mechanical negative feedback loop. [cite_start]It measures the *current* speed, compares it to the *desired* speed, and adjusts the valve immediately[cite: 80]. It doesn't predict; it controls. This brings us to the "Hello" experiment, which broke my brain a little. Researchers asked people to keep a computer cursor on a target. The computer applied a "disturbance" (forces pushing the cursor away) that the person had to fight against with their mouse. Here's the twist: The disturbance wasn't random. [cite_start]It was an invisible force field shaped like the word "hello" (written upside down and mirrored)[cite: 166]. The participants fought the force, keeping the cursor steady. When researchers looked at the participants' hand movements, they had perfectly written the word "hello". Crucially, the participants had NO idea they were writing words. If the brain were a "prediction machine," it would have needed to model the force to predict the hand movement. But the participants wrote a legible word purely by reacting to immediate error signals—instantaneously correcting the cursor's position. This is **Perceptual Control Theory (PCT)**. The theory suggests the nervous system isn't a linear pipeline (Input → Compute → Output). It’s a closed loop. We act to keep our *perception* of the world matching our internal *reference value*. [Image of Perceptual Control Theory negative feedback loop diagram] Think about catching a baseball. If you were a "prediction machine," you’d calculate the ball's trajectory, wind speed, and gravity, then run to where the ball *will* be. But that’s computationally expensive and error-prone. In reality, fielders just run in a way that keeps the "optical velocity" of the ball constant in their vision. If the ball looks like it's rising too fast, they move back. Dropping? They move forward. No physics calculus required. Just maintaining a visual constant. This solves the "Noise" problem. In predictive models, small jitters in your movement are considered "noise" or errors to be filtered out. It’s the system "feeling out" the environment to maintain control. This has huge implications for AI and robotics. We are currently building robots with massive compute power to "predict" stability. But robots built on PCT principles—like inverted pendulums that just react to maintain verticality—are often more robust and stable than the predictive ones. Why does this matter for you? It changes how we view "agency." We often think we need to predict the outcome of our actions to be effective. [cite_start]But the most efficient systems don't predict the outcome—they specify the goal and let the feedback loop handle the rest[cite: 39]. The "Prediction Illusion" suggests we aren't prophets simulating the future. We are controllers, surfing the present. We don't need to know what the wave will do in 10 seconds. We just need to keep the board steady right now. If you want to dig into the paper, it’s "The prediction illusion: perceptual control mechanisms that fool the observer" by Mansell, Gulrez, and Landman (2025). It’s a dense read, but it completely reframes the "Bayesian Brain" debate. One final thought: Next time you're doing something skilled—driving, typing, sports—notice the difference. Are you calculating what comes next? Or are you just managing the gap between *what you see* and *what you want*? You might find you're doing a lot less "thinking" than you assumed.

me watching the llm do the job i used to love



Muhammad Mustafa @Mustafadev72
3 Followers 126 Following Web dev & AI enthusiast. Building real-world projects. Sharing what I learn.

Atharva.mvk @ZeroZipAtharva
278 Followers 2K Following product development • ai • @realmadrid • movies • actual performance over performance theatre

Tloouijin @Tloouijin98044
172 Followers 7K Following There is no limit to what we, as women, can accomplish.

Berhie @Berhie353000
11 Followers 653 Following
Katrina @x9Cw6Hh9y7Bn4
35 Followers 961 Following


CatherineConan @O440J9kBs0OqT2
33 Followers 1K Following
SONG SEUNG HEON @SongH9701
2 Followers 105 Following
Isabelle 🌸 @Isabelle_vvv
267 Followers 2K Following Invest in your personal growth. Continuously learn, adapt, and evolve. The more you grow, the more you'll achieve. 🧠⬆️
Rodger Bartell @BartellRod80124
136 Followers 5K Following
Yi Xu @_yixu
623 Followers 437 Following AI researcher, interested in LLMs and reinforcement learning | Previously @UCL_DARK, @imperialcollege, @UniMelb
SmartGuard @Creaeavawh7190
88 Followers 947 Following
Abdullah_Azzam100 @Abdullah0Azzam
0 Followers 12 Following
Jeffrey Feldberg @JeffreyFeldberg
166K Followers 155K Following 9-figure exit insider. Deep Wealth Podcast host. Skyrocket profits w/ Deep Wealth Mastery. Secrets: https://t.co/toYqcW7h4c | Join: https://t.co/Km8xFJHAMj

Joseph Honpah @honpah
113 Followers 621 Following AI and Cloud Solutions Architect, AWS community builder #security, My portfolio:🔗https://t.co/UQ38YmwpYK Thank you Jesus 🙌🏾
RizzPepeAi @RizzPepeCoin
124 Followers 84 Following RizzPepe: Solana’s Coolest Memecoin | Secretly boosted by Musk’s AI magic | Join: https://t.co/MANZgXCX3X | #RizzPepe #SolanaMemecoin #GrokAI
Ossai David Ronick @RONICKSSTANDOUT
1K Followers 5K Following Go build something 🫵🏼 I HOPE WE ALL STAND OUT!.
Ybluuvau @Ybluuvau8106
17 Followers 788 Following
Allen Wang @AllenWangzian
2K Followers 736 Following cofounder & Chief Cupid Officer @Ditto_dates ; @ucberkeley cs

Kimi.ai @Kimi_Moonshot
173K Followers 136 Following Built by Moonshot AI to empower everyone to be superhuman. ⚡️API: https://t.co/XCrgjXAqMw @KimiProduct where we share cool use cases. @Kimidevs built for developers
Aadi Kulshrestha @MankyDankyBanky
3K Followers 204 Following 19 | Incoming @NVIDIA | SWE @Roblox | Prev @Shopify | Computer Science @ University of Waterloo
Joker @GTASixJoker
26K Followers 201 Following #1 Source for PARODY GTA 6 and Red Dead News | Everything here is satire | Reputable Insider | GTA 6 Voice Actor | These are fake stories
Muhammad Ayan @socialwithaayan
69K Followers 691 Following Breaking down AI media tools & no-code workflows | ✉️ [email protected]
Hüseyin @huseyn_erdemir
1K Followers 703 Following

Obsidian @obsdmd
209K Followers 0 Following The free and flexible app for your private thoughts. For help and deeper discussions, join our community: https://t.co/wHB7xZ3AjA
pdawg @prathamgrv
21K Followers 2K Following research x software @MSFTResearch || founder @tensortonic
GTA 6 Countdown ⏳ @GTAVI_Countdown
493K Followers 6 Following Countdowns | Facts | Latest News | Trailers | Memes | Not Affiliated with Rockstar Games
Selma🇵🇸 @SelmaAltunkaya
482 Followers 859 Following

Cleo @MendozCleo
45 Followers 80 Following “Libres son quienes crean, no quienes copian, libres son quienes piensan, no quienes obedecen. Enseñar, es enseñar a dudar” EG


Miguel Rojero @mikrojero
41 Followers 368 Following Nunca te traiciones... Siempre congruente con mis pensamientos/ corazón, caracter y pasion!!! 🏆🥇
yakari @fotros09
312 Followers 2K Following
Araceli @ara_degalindo
122 Followers 312 Following 🇲🇽 Invertir en GBM Casa de Bolsa ¡es muy fácil! búscame y te digo como

Jianyang Gao @gaoj0017
3K Followers 890 Following Author of the RaBitQ quantization algorithm; Postdoc at @ETH on AI, ML System, Vector Database; prev. PhD @NTUsg; ICPC World Final;
Google Research @GoogleResearch
96K Followers 17 Following Impossible? Let’s see. From algorithms to neuroscience to AI, Google Research strives to progress science, advance society & improve billions of people’s lives.
Cheng Lou @_chenglou
69K Followers 448 Following Worked on: @reactjs, @messenger, @reasonml, @rescriptlang Currently: @midjourney, Pretext
Qinqing Zheng @qqyuzu
874 Followers 258 Following MTS @_inception_ai | Ex RL/Diffusion @ FAIR + LLaMA Reasoning @MetaAI | Stat postdoc @Wharton | CS phd @UChicago
Paolo Cadoni @PaoloCadoniX
75 Followers 169 Following I make apps: https://t.co/g8gmoKQUIO https://t.co/aHcvsl87gs
el.cine @EHuanglu
132K Followers 440 Following AI consultant | film director | sharing practical ways to use AI for you and your business. all views are my own.
Tuki @TukiFromKL
116K Followers 400 Following 20 | The QUANT | I love AI Building https://t.co/FaBWVoVdjb
Muhammad Mustafa @Mustafadev72
3 Followers 126 Following Web dev & AI enthusiast. Building real-world projects. Sharing what I learn.
hewar @hewarsaber
15K Followers 384 Following brands, websites, apps. trusted by a16z-backed teams. founder, https://t.co/fGNiDBIyuu


Ryan Hart @thisdudelikesAI
31K Followers 594 Following Dude that likes AI. Live in Mom basement not SF. #notcracked Currently directing a film called “Revenge of the VibeCoders”

Syady @SyadySyarief
1K Followers 642 Following Product design studio for early-stage startups https://t.co/hMsuc7ZCml • open for projects Check highlights for work
Oliver Ulvebne @therealoliulv
1K Followers 1K Following chief pondering officer - ssh oliulv(dot)com
Aly @alishteinn
368 Followers 211 Following founder of https://t.co/88sARWRxDx. @cursor_ai ambassador. talking about communities, startup, growth 🔭 fav X grow tool: https://t.co/9v43sDBiiC

۟ @maxwin
34K Followers 4K Following internet money participant / prev @pudgypenguins / alt acc: @ProfitsMaximus
Pudgy Penguins @pudgypenguins
701K Followers 3K Following The internet’s favorite penguins 🐧 https://t.co/MClWfXV0Vb https://t.co/DQprRpl0tL



Berko 燕麦 Pengumax... @Berko_Crypto
55K Followers 7K Following Oatmeal appreciator // Community Lead @PudgyPenguins

RED @RED__Crypto
12K Followers 3K Following Abstract Quant. Trader, Gamer, Clipper. Digital 3D Artist/Animator @TollanUniverse Ambassador. F4VVZI
jordy @jordymaui
18K Followers 949 Following marketing @sportfun | @sdfntwrk | 🏴 world cup mode | early @OpenClaw & growing @JoinAgentic | FFC
stdrc @istdrc
10K Followers 624 Following founder of https://t.co/aBfUQnqAqG @Slock_hq | former author of Kimi CLI @Kimi_Moonshot | ex-database kernel engineer @RisingWaveLabs
Appthetics @appthetics_com
61 Followers 18 Following https://t.co/OrJfu9K9Fx — Design mobile apps just by chatting with AITrends for United States
You might like